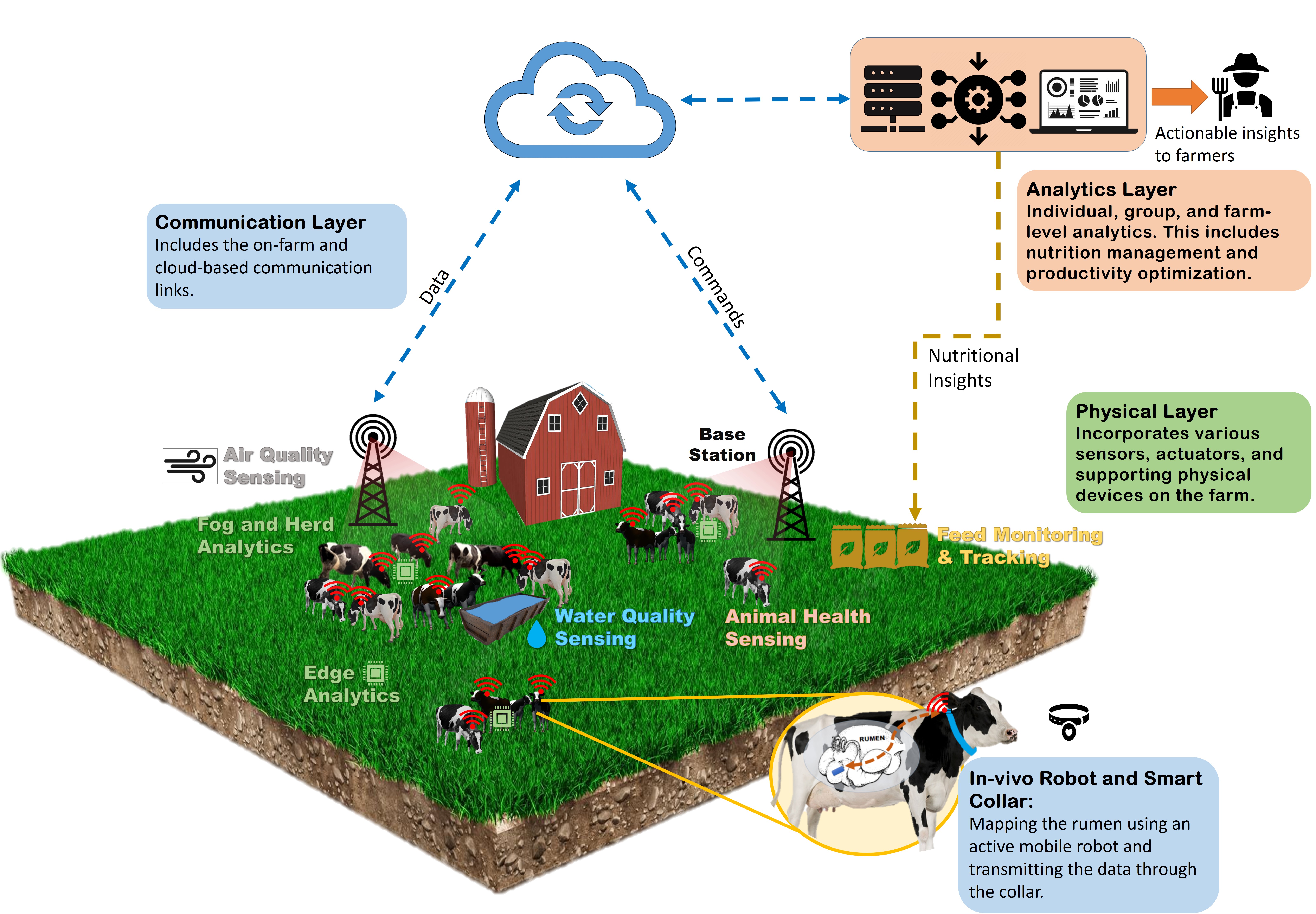
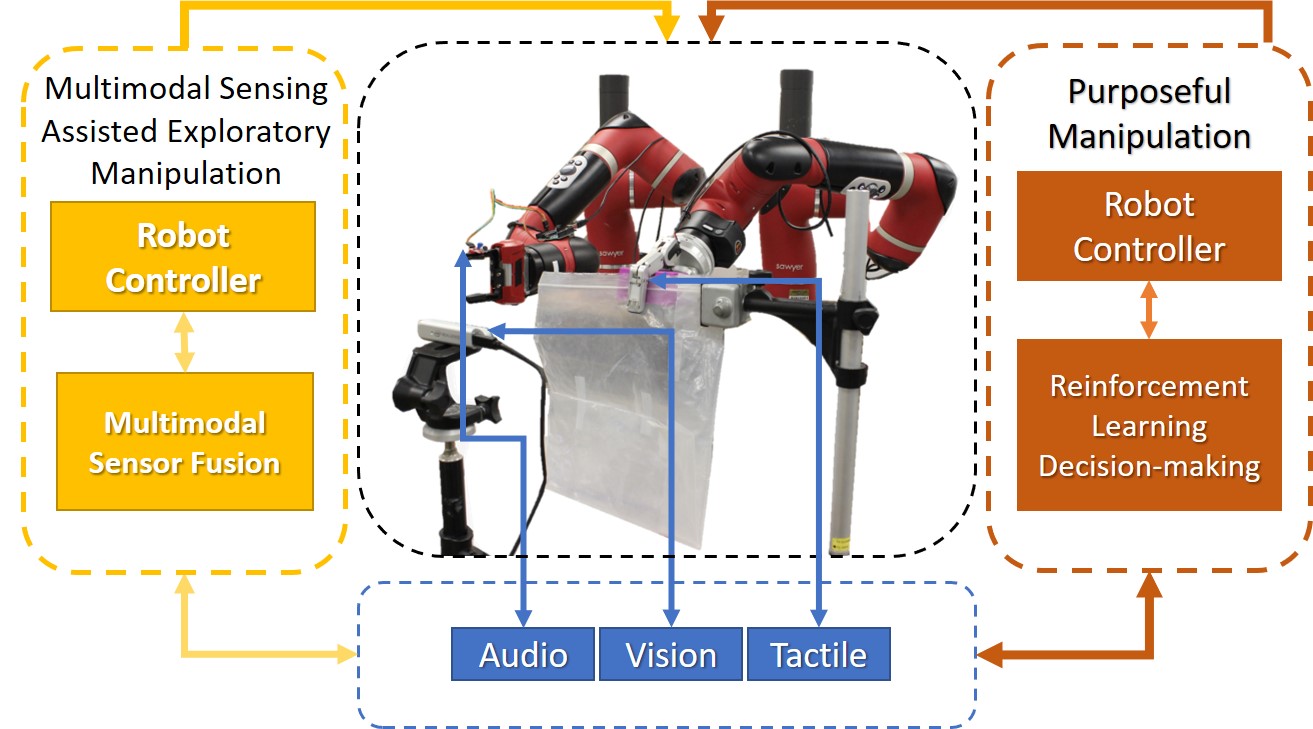
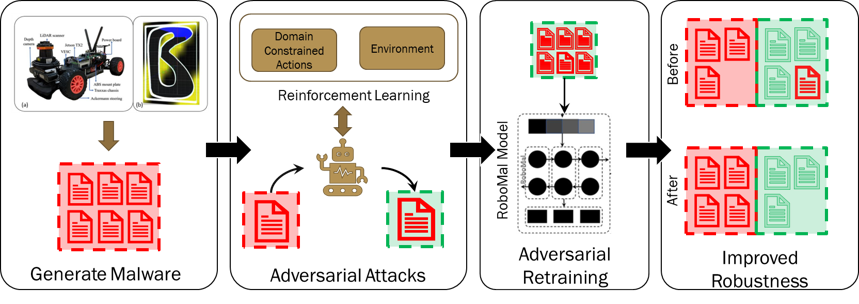
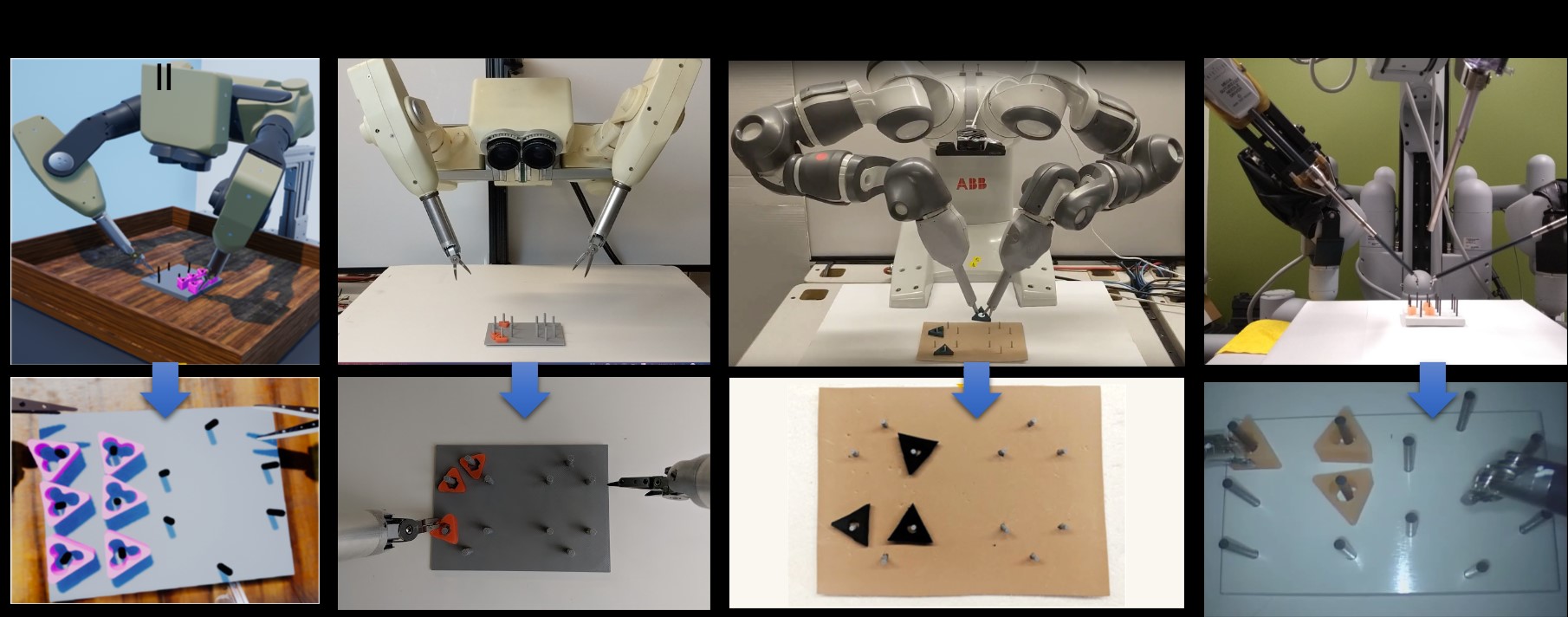
Closed-Loop Cyber-Physical System with Robots at the Edge for Precision Animal Agriculture A closed-loop cyber-physical system with robots at the edge for improving animal welfare and sustainability in precision dairy farming Learning Contact Intensive Tasks Using Multimodal Preception and Reinforcement Learning Learning multimodal contact-rich skills using reinforcement learning Robust and Energy Efficient Malware Security for Robot Cyber-Physical Systems Building scaled-down, distributed machine learning models for static malware detection on robots Transferring Dextrous Surgical Skills among Robots Building a real to real and simulation to real framework for knowledge transfer among robots.